内蔵ADCを用いた高精度・高確度の電圧測定と評価
はじめに はじめまして。電気エンジニアのれいです。 今年の4月より新卒として働き始めました。 皆さんもマイコンのADCモジュールを用いてアナログ電圧の値を読み取ることがあると思います。さて、マイコンのADCを用いて読み取 […]

Wi-Fiで画像表示できるスマート缶バッジを作ってみた – 前編
はじめに こんにちは、Cerevoの駆け出し電気エンジニアのたひです。今回が初投稿になります。 交流会や展示会、オフ会などリアルでの交流の場で自身を表すのに名刺交換やX(旧Twitter)のプロフィールなどを見せて合うこ […]
スマホで操作できる改造ミニ四駆「MKZ4」をさらに改造してカメラ付きラジコンに〜社内爆走計画〜
こんにちは PMの後藤です。 Cerevoではミニ四駆を改造してWi-Fiラジコン化するMKZ4という製品があります。今回それをさらに改造して、Wi-FiマイコンとしてポピュラーなESP32にカメラがついたモジュールを利 […]

ガシャポンのカプセルをラジオに電子工作!夏休みラジオ少年計画
こんにちは、Cerevoの押切です、毎日暑いですね。8月ももう半ばですが、今回は夏休み工作的に、初心者でも簡単に作成できるガジェットの作成記事となります。とある理由から、ガシャポンのケースに収まるものというお題で考えてみ […]
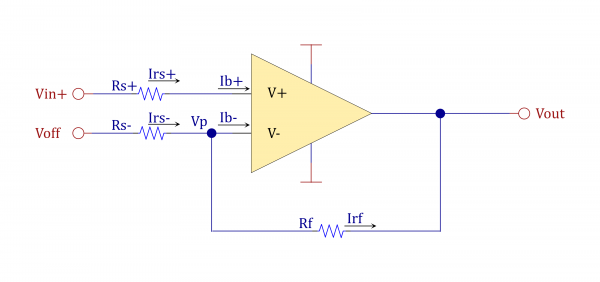
オペアンプバイアス電流によるオフセット電圧の影響を考える
こんにちは。こんばんは。おはようございます。おやすみなさい。 電気エンジニアのyokoyamaです。 オペアンプには、入力バイアス電流というものが存在します。通常、理想のオペアンプとして仮定され、入力バイアス電流 = 0 […]
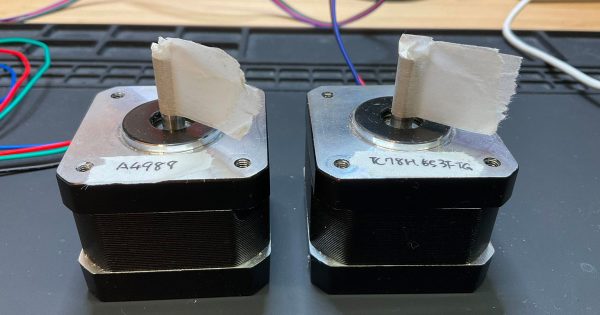
格安モータドライバを使って、すごーくゆっくり静かに回すマイクロステッピングを実装するには?
こんにちは。PMの後藤です。 唐突ですが皆さんはステッピングモータが好きですか?僕は好きです!個人的な制作活動でも何度も使っていますが、 位置制御が非常に簡単に出来て便利です。ただし動作音は結構しますよね。巷では NEM […]
ミニ四駆ツイストクローラーを改造してワイヤレス制御!工作セットとMKZ4で簡単電子工作
こんにちは、押切です。前回の続きという訳ではないのですが…… 左右独立駆動型のクローラー、 楽しい工作シリーズ(セット) No.233 ツイストクローラー工作セット(2chリモコン) で、ワイヤー […]

四輪クローラー工作セットでワイヤレスリモコン化&速度制御に挑戦
こんにちは、押切です。 タミヤさんから、「四輪クローラー工作セット」という魅力的なキットが発売され、かつ、ボディはワイルドミニ四駆のものが使用できるということで早速入手して見ました。 格好いいので早速、スマホで操作できる […]
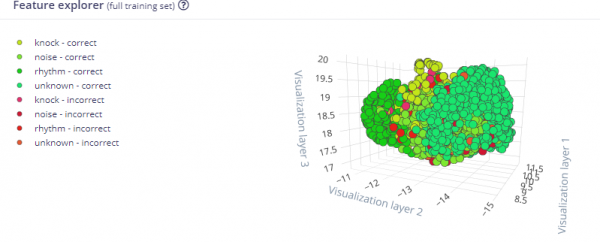
マイコン機械学習で「ひみつのあんごうノック」で開くボックスを作る
こんにちは、9月からCerevoでプロジェクトマネージャーをしている後藤です。 子供の頃に秘密基地を作って遊んだ時、ノックのパターンを決めて「ひみつのあんごう」なんていってましたよね? そんな「ひみつのあんごうノック」で […]
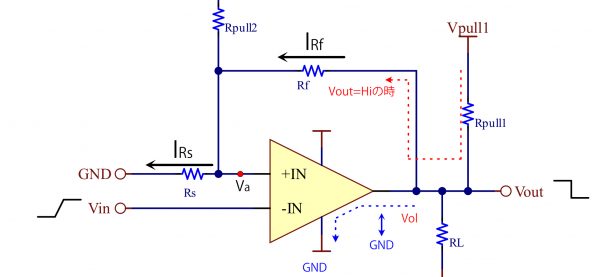
オペアンプを用いたコンパレータ動作時におけるヒステリシス回路の考え方
はじめに こんにちは。こんばんは。おはようございます。おやすみなさい。 第2種電気工事士に受かった電気エンジニアのyokoyamaです。 今回はオペアンプを使ったコンパレータ動作にヒステリシス回路を追加し、その動作原理に […]

ラズベリーがなければ、オレンジを食べればいいじゃない。Orange Pi Zero2(TELEC版)を試食~Androido10.0編~
こんにちは、オンラインイベントなんかもはじめた押切です。今回は個人的にヒットしたSoCボードについて紹介していきます。 昨今の半導体不足は深刻ですね。商社に頼むと72週待ちですと言われましたが、その部品が届くころ、弊社は […]

板金加工の魅力と、その工程・加工機を見る
はじめに こんにちは。生産管理の芹澤です。 何か製品を作る時、いわゆるメカ部分では内部構造を固定する構造物、動かすための機構、筐体(ケースなど)が必要です。 それらの外側を何で作るかですが、大きく分けると「鉄・樹脂などの […]

ダイソー300円USBスピーカーを改造してUSB接続だけで鳴らす
電気エンジニアのちはです。今回はダイソーで売ってる300円のUSBスピーカーを、USB接続だけで鳴るように改造していきます。 【前段】300円の”USBスピーカー”を購入 300円のUSBスピーカーを改造しようとしたきっ […]
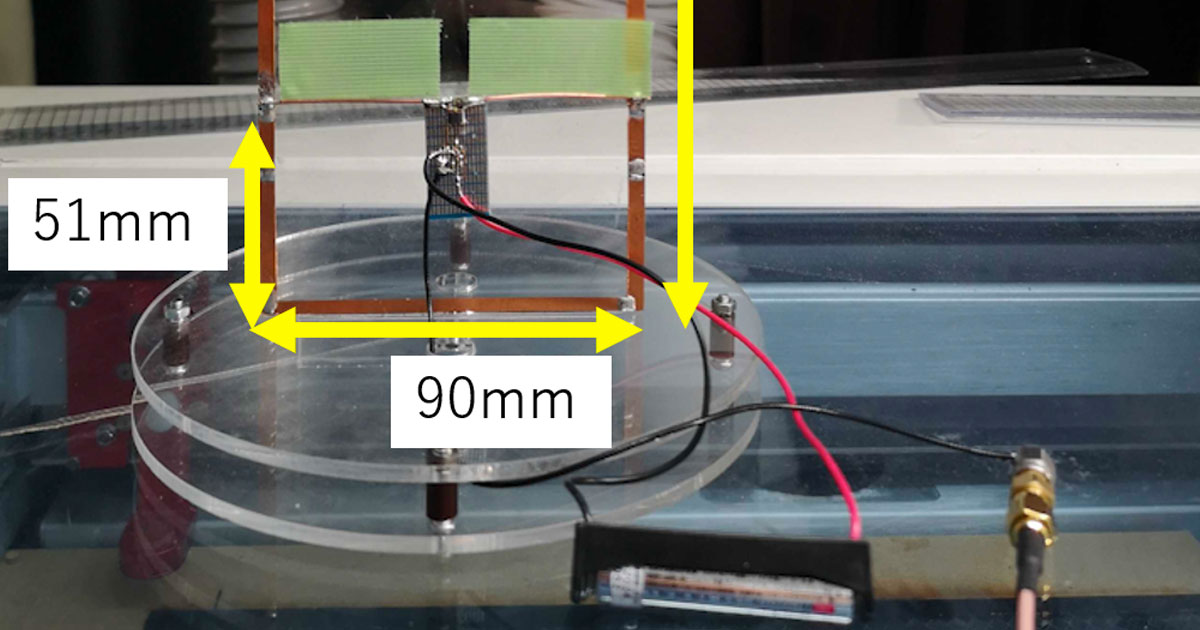
地デジ用室内アンテナの自作と、スペシャルチューン版の制作
こんにちは。電気エンジニアの早川です。最近、電波を扱う案件を担当したこともあり、専門外ではありますが興味の対象がアンテナに向いています。そんなわけで、この記事を書いてみました。 八王子のテレビ受信事情 東京の場合、地上波 […]
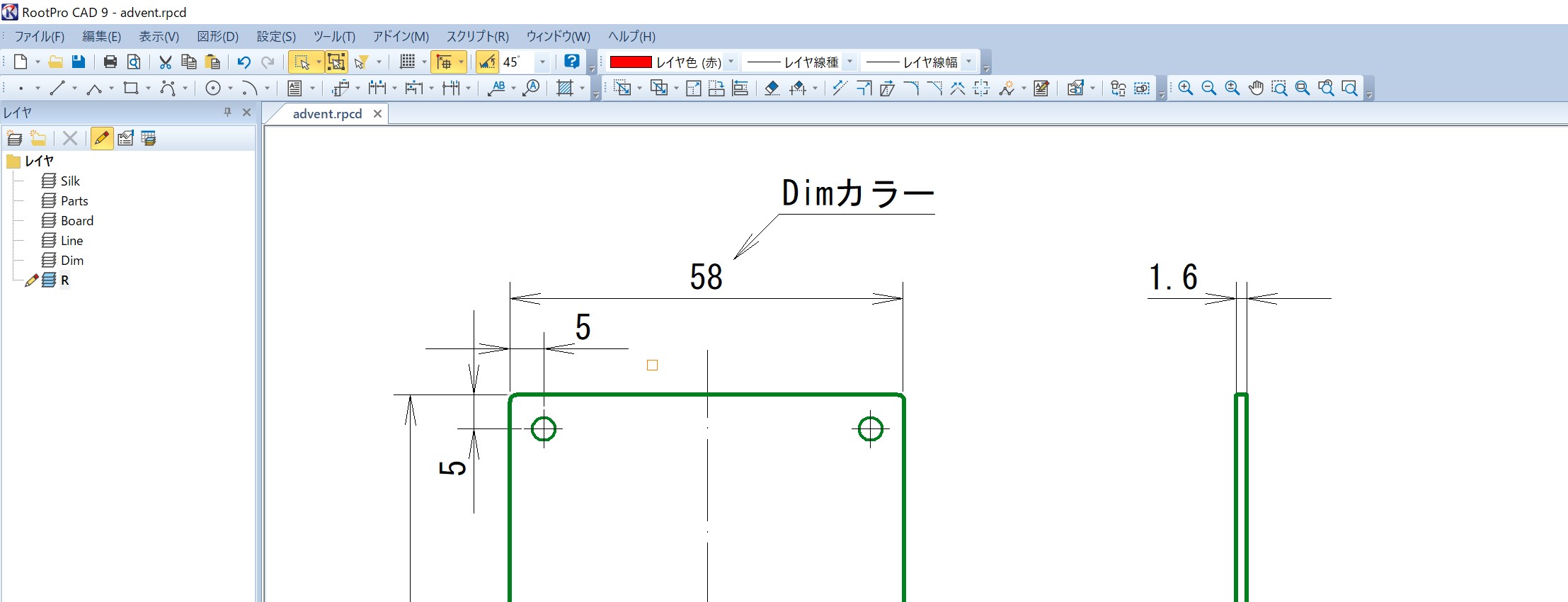
2DCAD「RootProCAD」と「Solid Edge 2D Drafting」を電気エンジニアが使う場合
こんにちは、電気エンジニアのyokoyamaです。こうして年末に記事を書くのも2回目なので、時間が経つのは早いものだと実感しております。 さて先日、とあるプロジェクトにて2DCADを使う場面に遭遇しました。「今時2DCA […]