100%オリジナルで高品質新しいSTM32F103完全に交換自由な船積み
STM32について Cerevoでは様々なメーカのMCUを使用していますが、汎用のMCUとして用いるものの一つとしてSTMicroelectronics社製のSTM32シリーズを使うことがあります。安価なARM Cort […]
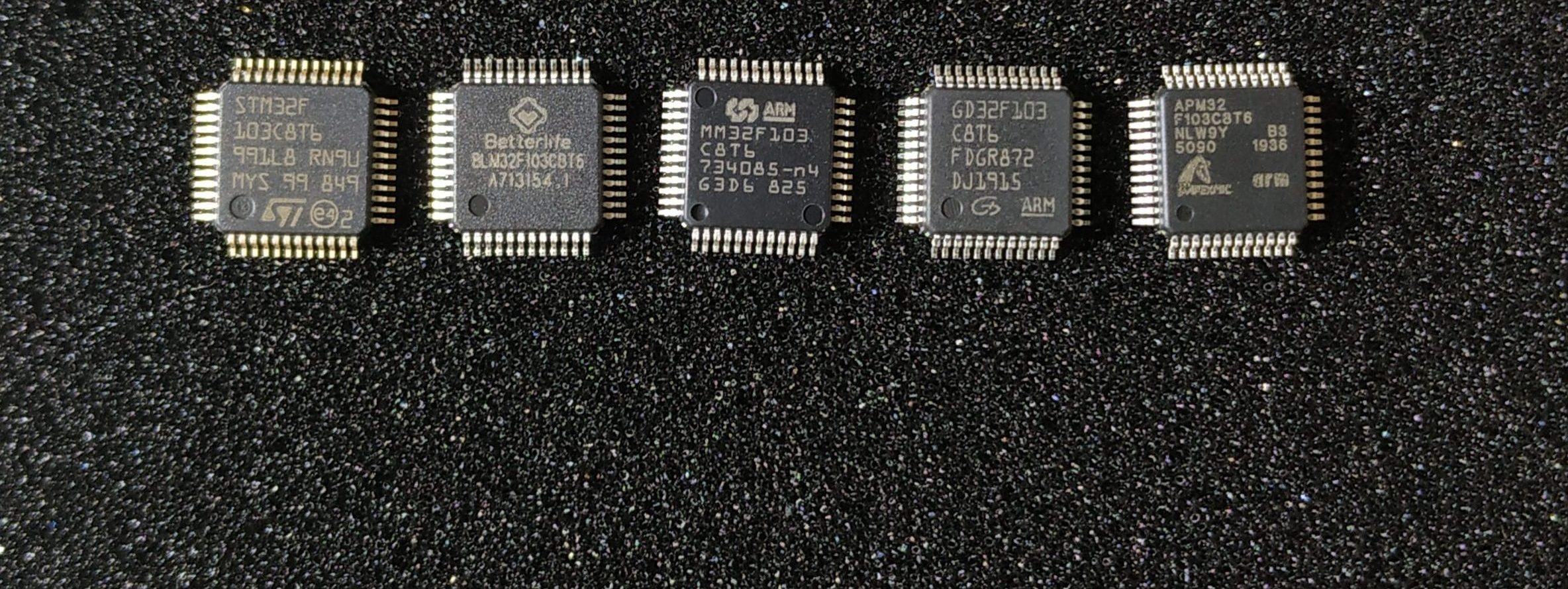
![[21日目]激安中華USBマイコンは使えるのか](/wp-content/uploads/2018/12/0899fa53cb50706e4f4cf45a8047b069-e1544880568137.png)
[21日目]激安中華USBマイコンは使えるのか
本記事は、Cerevoスタッフが業務や趣味について思うままに書き綴るアドベントカレンダー企画「Cerevo アドベントカレンダーTechBlog 2018」の第21日目です。 Cerevo アドベントカレンダーTechB […]
![[20日目] 基板を起こしてモータを動かそう](/wp-content/uploads/2016/12/pcb_3d.png)
[20日目] 基板を起こしてモータを動かそう
男の子ならいくつになっても動くオモチャって楽しいですよね。エンジンやモータが好物です。電気エンジニアのべーたです。 今回は簡単にモータを回して遊ぶ方法をご紹介します。 趣味で工作をされる方にはArduinoやmbedで動 […]
![[20日目] DOMINATOR MAXI を魅せる基礎技術](/wp-content/uploads/2015/12/DM1_screenshot.png)
[20日目] DOMINATOR MAXI を魅せる基礎技術
Cerevoで電気設計をしております,丸山です.タイトルにもありますが,開発コードネーム「DOMINATOR MAXI」の電気設計を担当しております. この製品がどういった製品なのかをご存じない方は上記リンク先のリリース […]