こんにちは。中村です。
私はCerevoの中でも数少ない新卒のうちの、さらに希少種である文系出身です。「IoT」というバズワードが発する芳ばしい香りに誘われて2016年4月から事務系職として働いています。
さて、文系出身者である私は「IoT」のInternetもThingsもこれまで対して勉強したことがありません。しかし徐々に社外の方と交流する機会も増え、IoTについて質問をされることがよくあります。最初はそれっぽい適当な返答でごまかしたり、抽象度を引き上げて煙に巻いたりと、のらりくらりかわし続けてきたのですが、それにも限界があると感じ、いよいよ本格的にIoTについて勉強しなければならないと思い始めました。
しかしながら、世に出回っている「IoTがわかる!」系の本を何冊か手に取ってみたものの読んでもよくわかりません。人工知能とか自動運転とかが書いてあっても、それをどう実現するのかは書いてありません。
「これは困ったぞ……理系でなければIoTを扱うことはできないのではないか……」と思っていたそんな折、なんと弊社からIoTが学べる学習キットが発売されました。

https://maker.cerevo.com/ja/mkz4/
今回のエントリでは、私が実際にこのIoT学習キットである『MKZ4』の組み立て行い、その体験を通じてIoTって実際に何をするものなのかをお伝えできればと考えています。
まだIoTとはなんじゃらほいという方も、是非このブログを参考に、『MKZ4』にトライしてみてください。
それでは早速行ってみましょう!
準備編

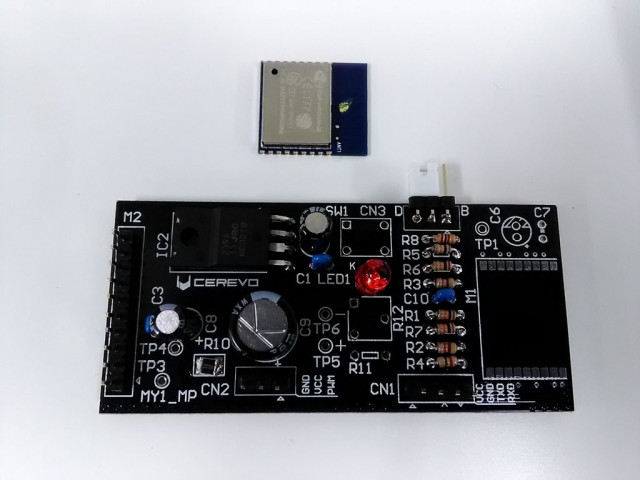
- MKZ4
- MKZ4WK
- ワイルドミニ四駆
- MKZ4ガイドブック(Kindle版)
準備するものはこの四つです。
また、MKZ4ガイドブックは腕に自信がある方はなくても構いませんが、電子工作が初心者という方は無いと厳しいです。付属のマニュアルだけでは落とし穴があります。Kindle Unlimitedでも読むことが可能ですので、ぜひ用意して臨むことをお勧めします。
電気編
準備が整ったらいよいよ開始しましょう。
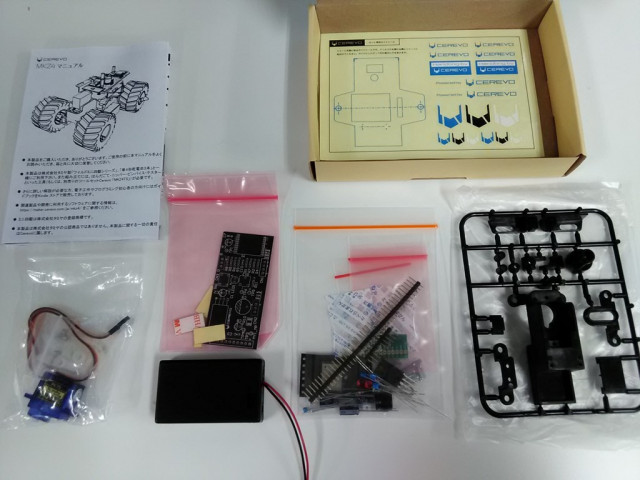
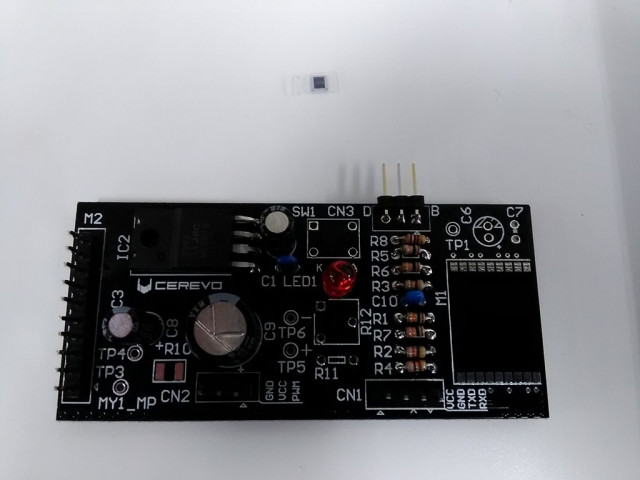
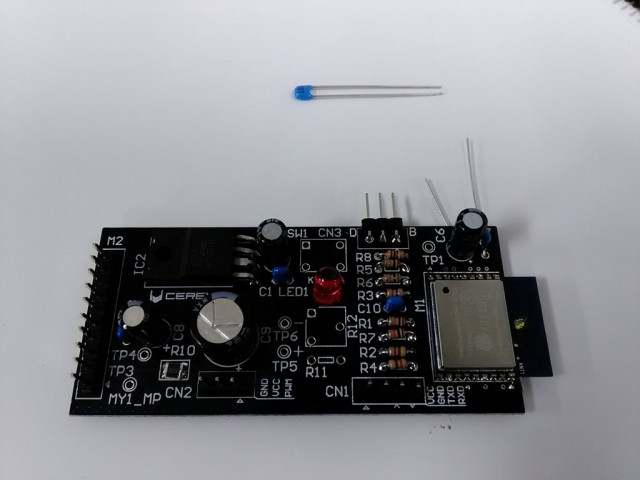
MKZ4を開封するとこんな感じです。
こんなに小さなパーツもあるのでなくさないように注意しましょう(※これは振りです)。
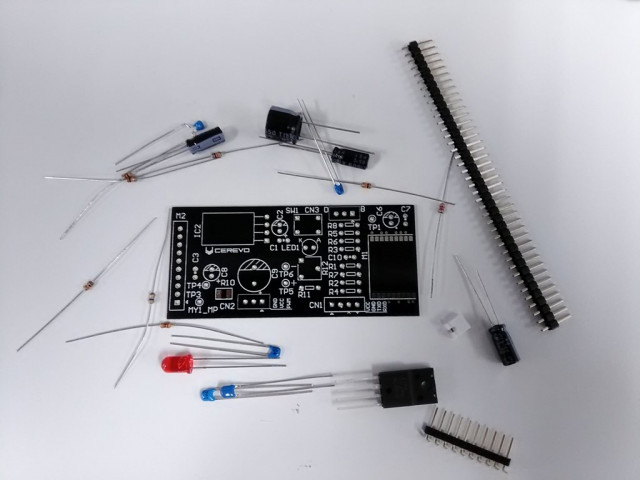
まずは電子部品から基板の上に載せていきます。ちなみに「基盤」ではなく「基板」です。これは入社してから何度も注意されますので、覚えておくとCerevoに入社しても困りません。

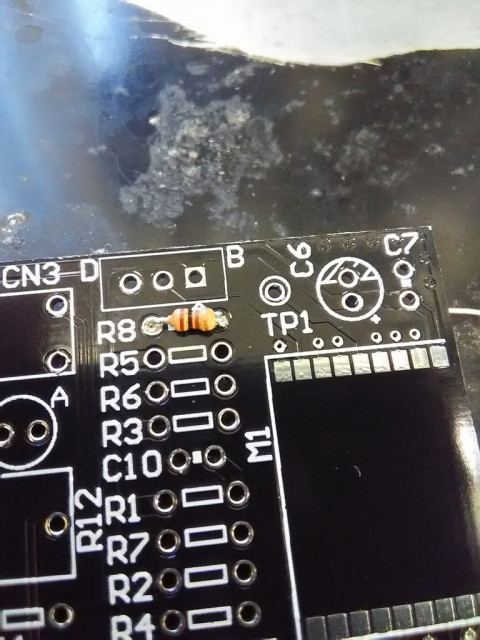
はじめの一歩は抵抗です。3種類あります。パーツの色をよく見て間違えないように乗せていきます。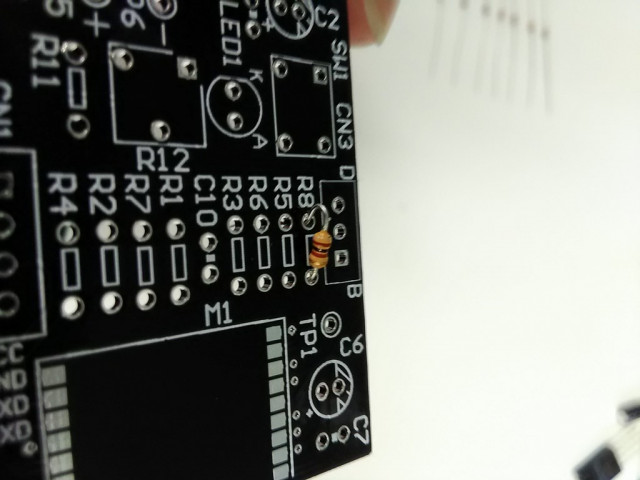
根元からガッツリ曲げないとこんな感じで浮きます。浮いても大丈夫ですが不格好なのでなるべく基板にぺったりくっつくようにします。
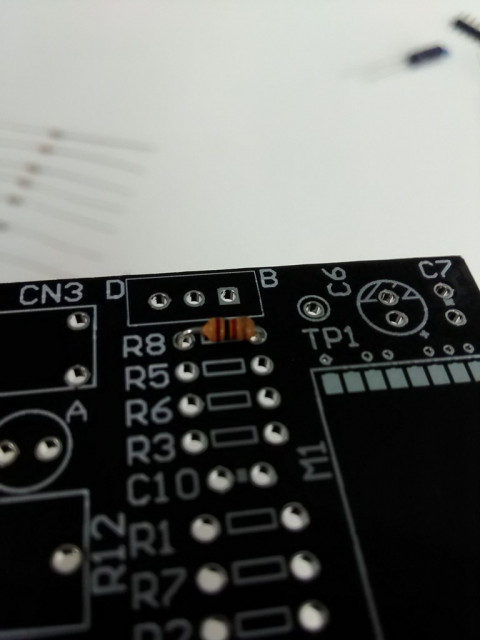
こんな感じ。
裏側です。
さて、ここまでできましたら、いよいよ半田付けを行っていきます。半田付けを行ったのは、中学3年生の時に手回しラジオキットを授業で作成たのが最初ですが、Cerevoに来てちょくちょく触らせてもらっていたためちょっと自信があります。
機材はこちら。製品の基板は顕微鏡ないと厳しいですが、今回はなくて問題ありません。
こんな感じでランドを熱し、左サイドから半田を付けます。
1個付きました。
反対側も半田付けします。
基板を覗いてみて、穴が開いていなければしっかり半田が盛られています。穴が開いていると取れやすく、不具合の原因になるのでたっぷり盛っておきましょう。
余った線はニッパーで切り取ります。
最初の1つが乗りました!
次々に抵抗を乗せていきます。
セラミックコンデンサも乗せていきます。
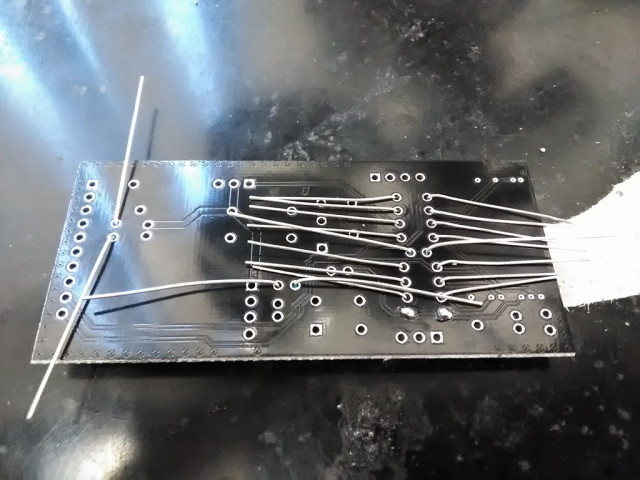
裏側です。半田付けするところがたくさんありますが、まだ序の口です。
サイドから見て半田の盛り方がおかしいと感じたらその都度直します。
お次にピンヘッダ。
手で割ります。
基板に置いて、

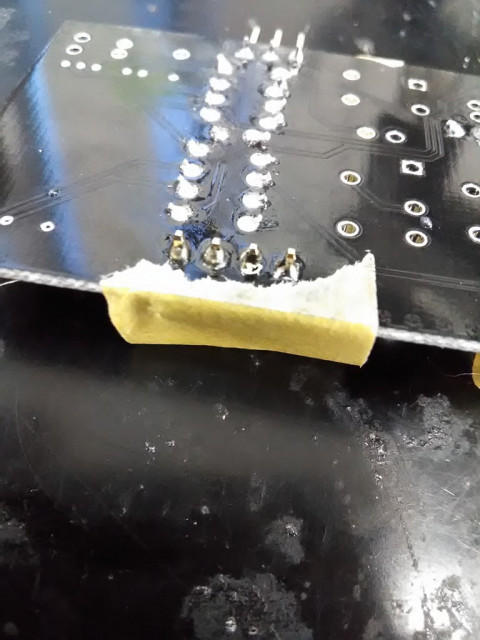
マスキングテープで固定します。
こうしておくことで裏返してもぐらつきません。
半田付けし、おかしそうな箇所は修正します。
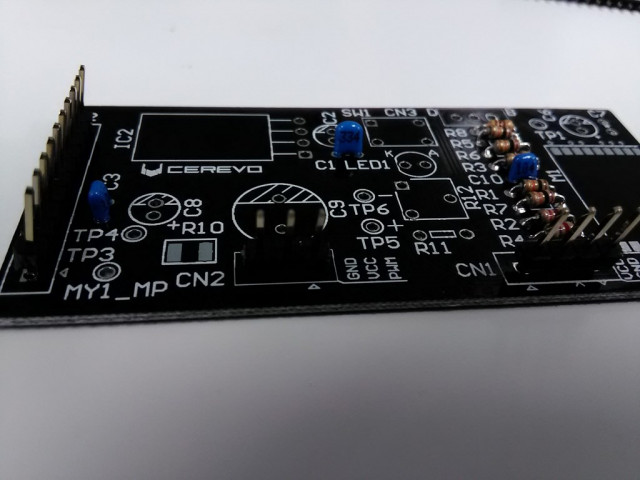
ついでにL字ピンヘッダもつけてしまいました。
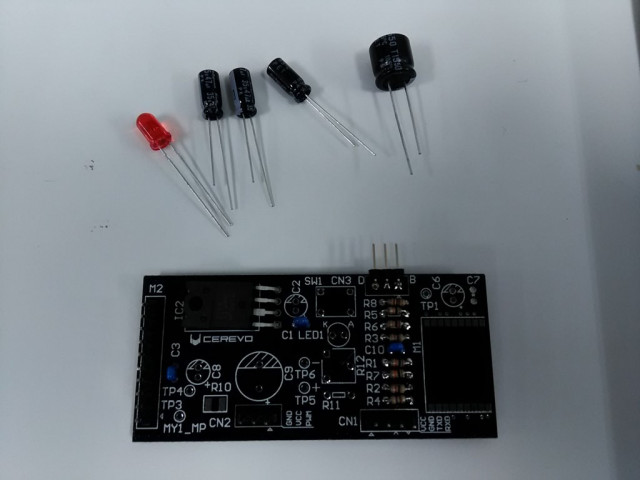
LEDライトと電解コンデンサー。これらは取り付けの向きが決まっているので注意が必要です。
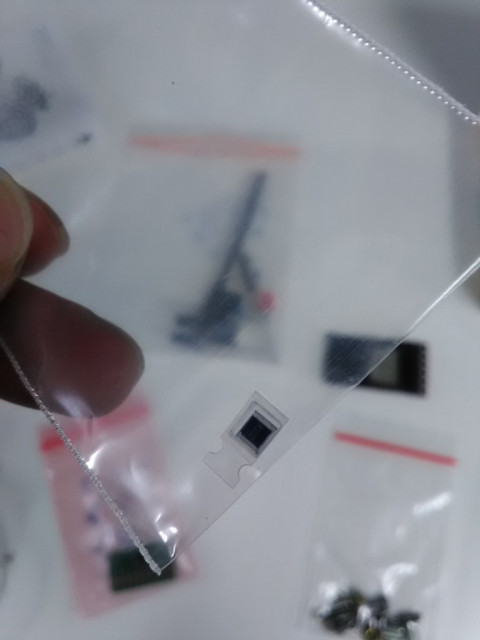
さて、最初の難関のチップ抵抗まで来ました。すこぶる小さいです。鼻息で飛んでいくので扱いに注意が必要です。
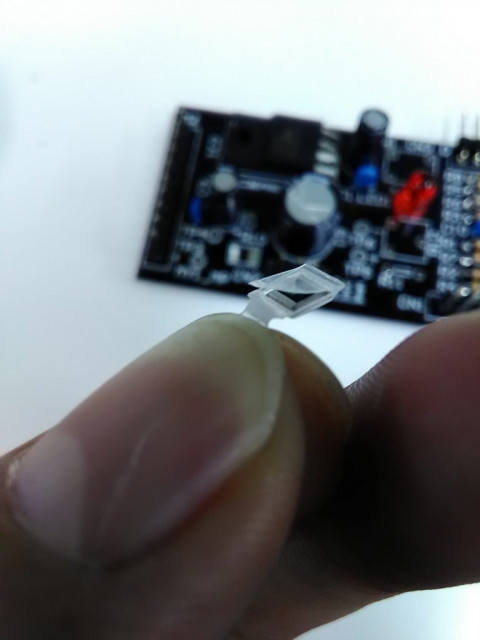
もはやフィルムをはがすところから苦戦。
やっと剥せたところで撮影するための席から半田席へもどろうとしたところ……

落としました……。
あれだけ気をつけたのに、ピンセットで持ち運びをした結果がこれです。完全に迷彩になっています……。(ちなみに右上の白い点がそれで、探すのにとても苦労しました)
みなさんも本当に気をつけてください。
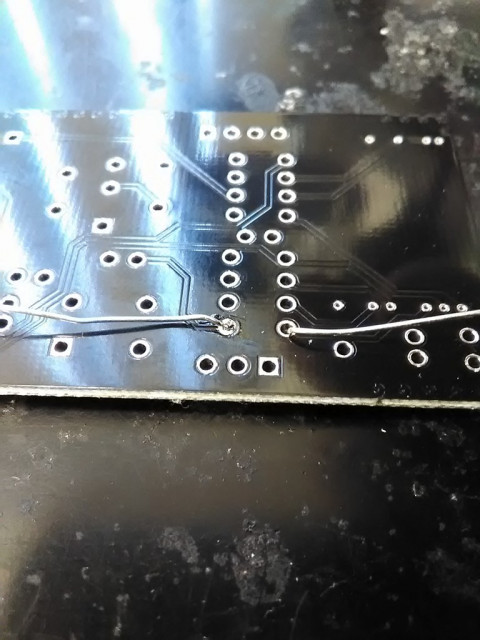
気を取り直していきます。基板のランドの片側に「予備半田」とよばれる半田をあらかじめおいておきます。
ピンセットで位置を合わせ、半田を溶かして乗せます。

右側にも半田を置いて完成です。右側は上から半田を置いただけなので、若干不安です。しかしここは後々エラーが出たらその時に考えることにして先に進みます。
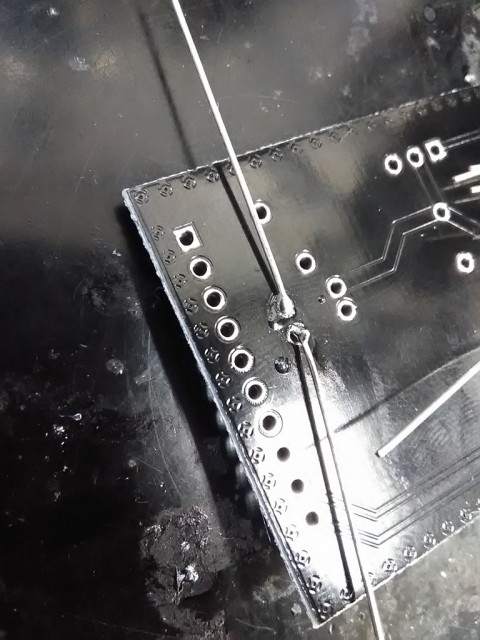
電気編のクライマックスが早くも登場です。
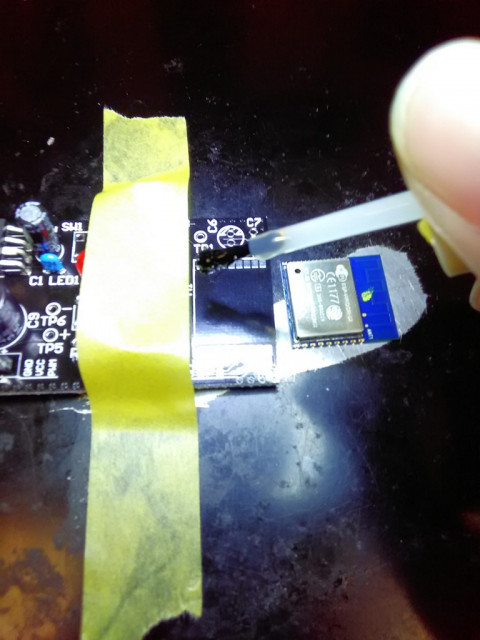
動かないよう台座に固定して、フラックスという秘密兵器を使います。これを塗ると半田付けが非常にしやすくなります。
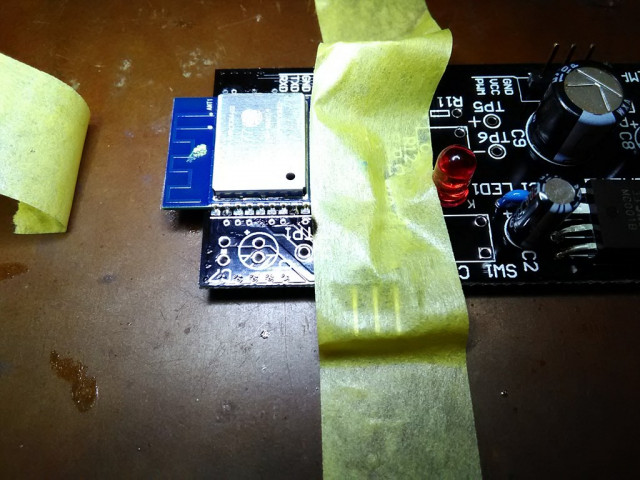
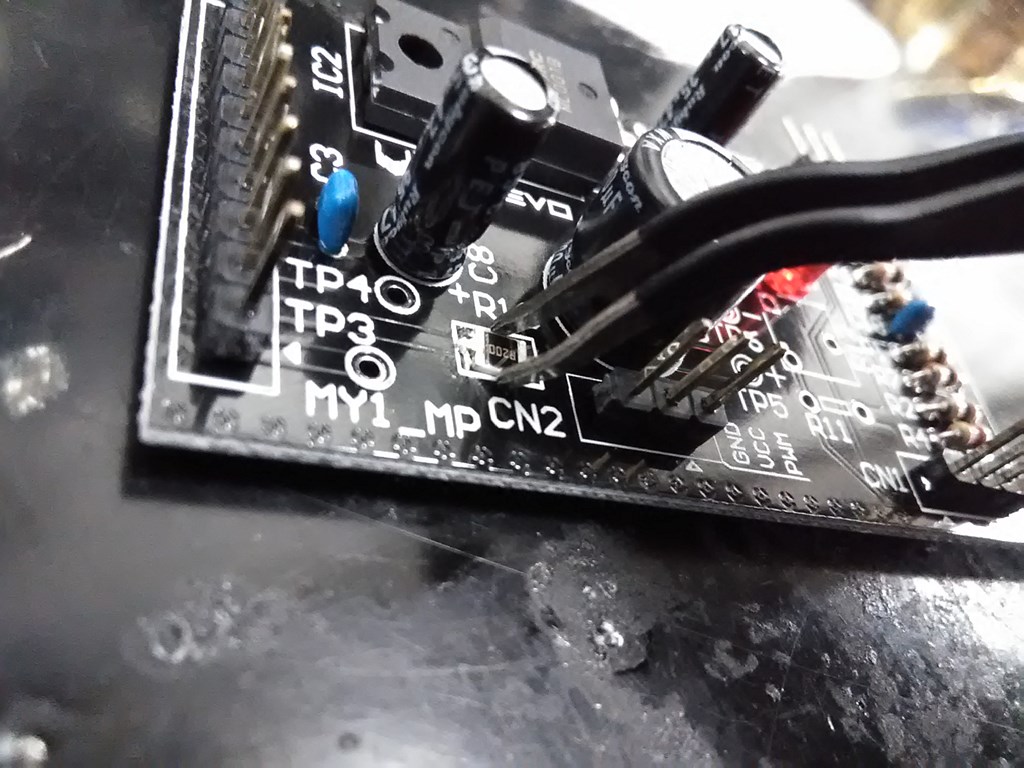
まず、最端の一個内側の4ヶ所を半田付けし、ESP8266を基板に固定します。端のピンはGNDにつながっているので半田付けに時間がかかり難易度が上がります。そのために内側のピンから半田付けを行います。
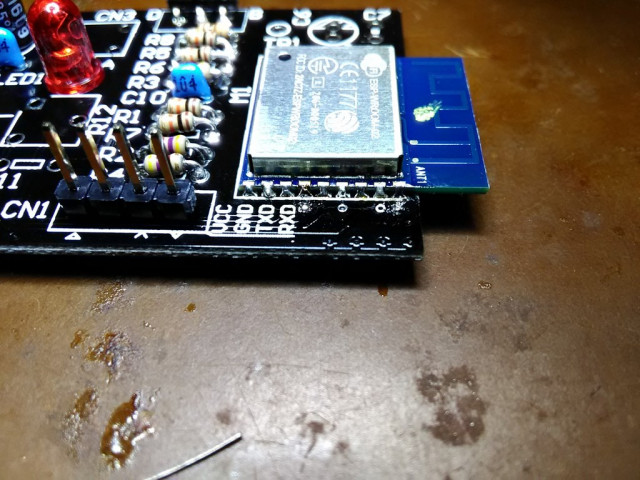
非常に苦労しましたが、押切先生のご指導の下、すべてのピンの半田付けが完了しました。このESP8266の半田付けの解説はこちらの記事を参照してください。動画付きで非常にわかりやすく解説されています。
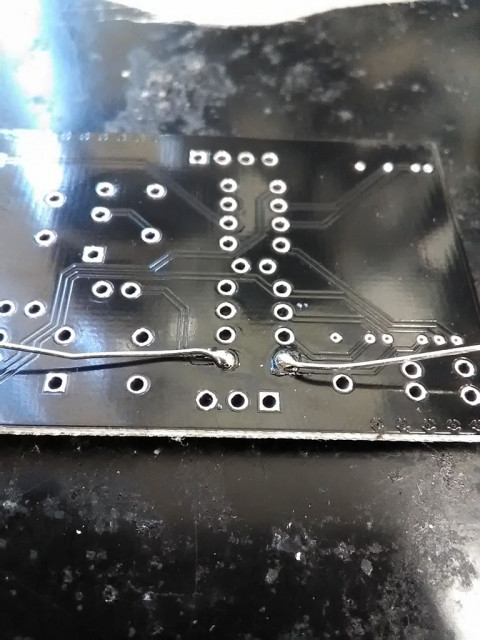
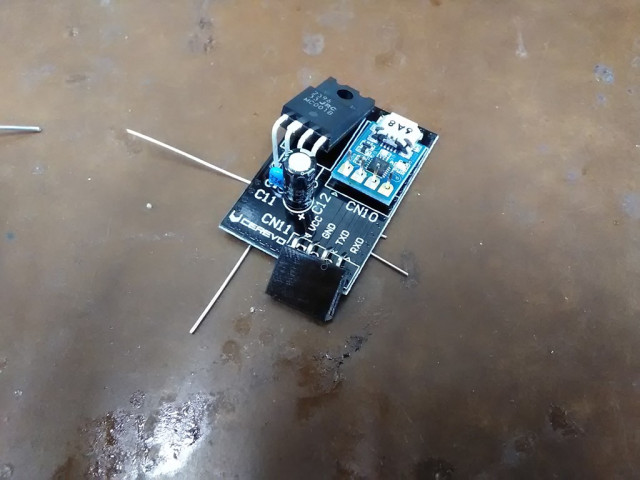
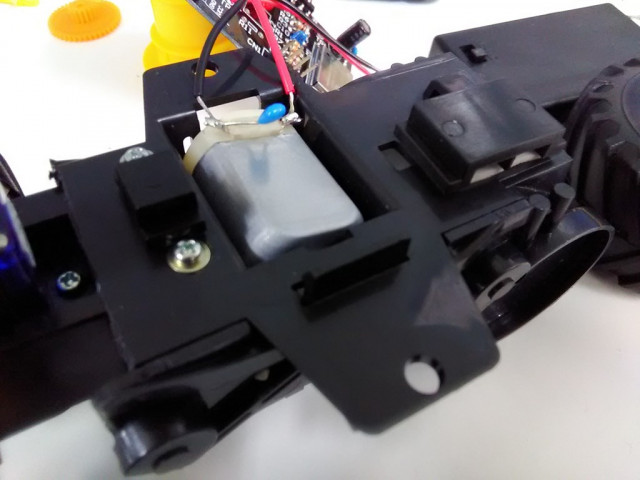
山を越えたので後は一直線です。残りのコンデンサーをおいていきます。一つは後でモーターにつけるのでこの時点で余っていても問題ありません。
モータードライバモジュールもつけ、終わりが近づいてきました。
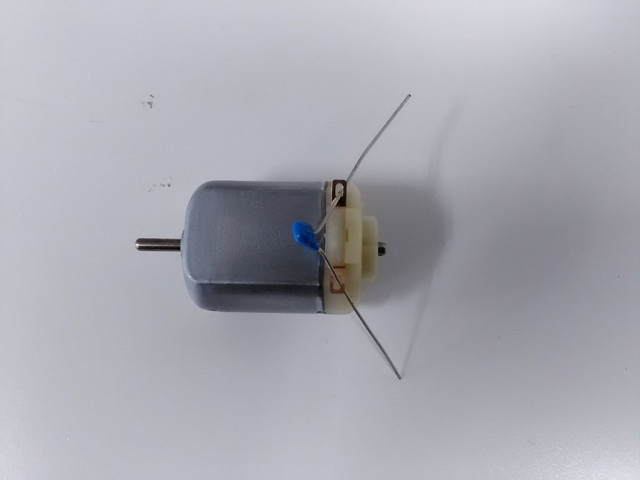
ワイルドミニ四駆の方からモーターを取り出し、余っているコンデンサーを付けます。

この時忘れないようにピニオンギアをつけましょう。後から付けようとすると基板ごと動かす必要があり面倒です。
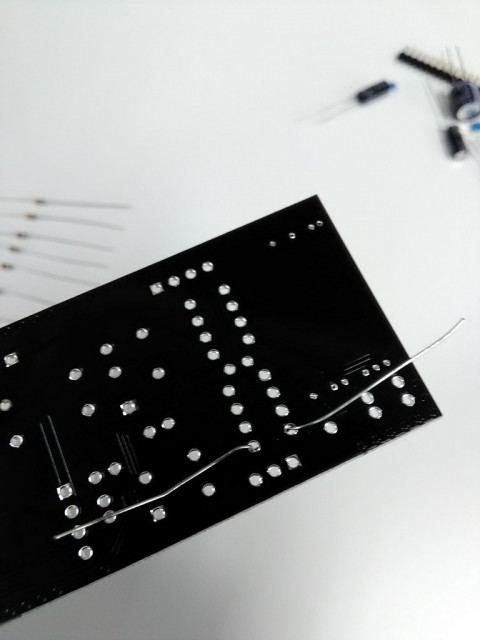
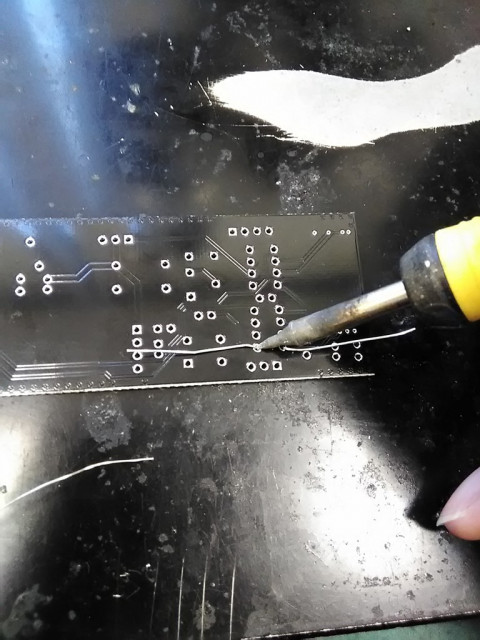
電池ボックスを用意し、赤と黒の線をモーター接続用に切り離します。60mmです! ここで私は適当に半分くらいに切ったために後で電池ボックスの収納に苦労しました……。
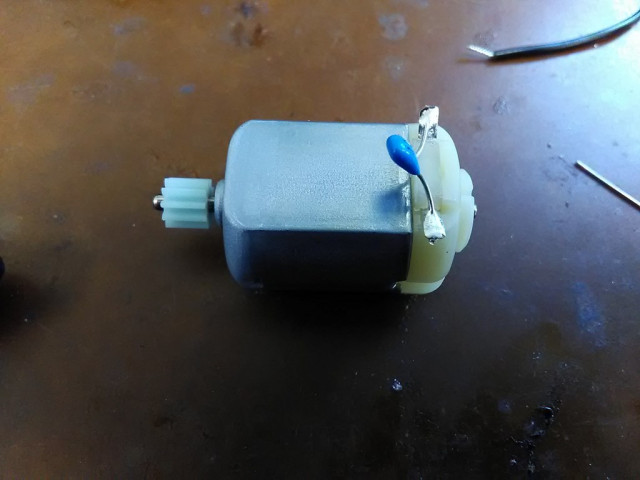
モーター。

基板取り付けのため導線の被覆を向きます。オフィスにはそれ用のこんな便利なペンチがあります。

つるん。
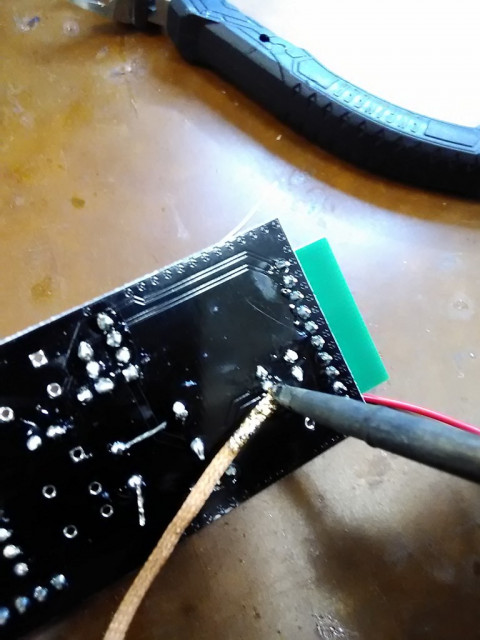
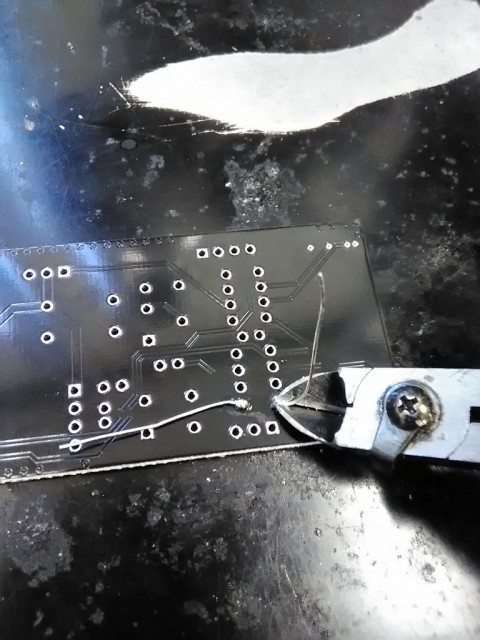
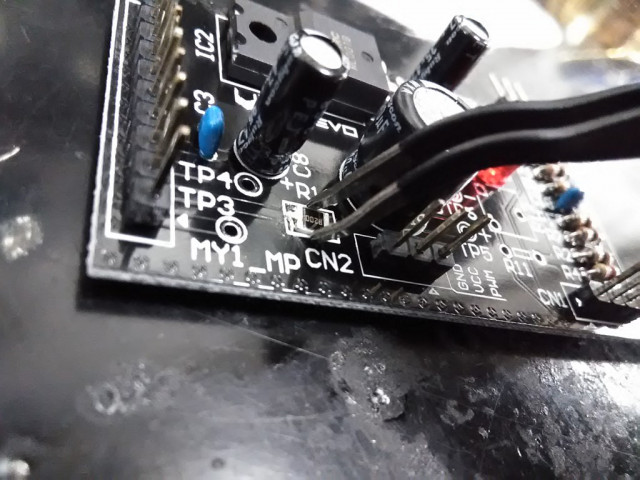
途中、ブリッジしてしまったところの半田を吸い取ります。
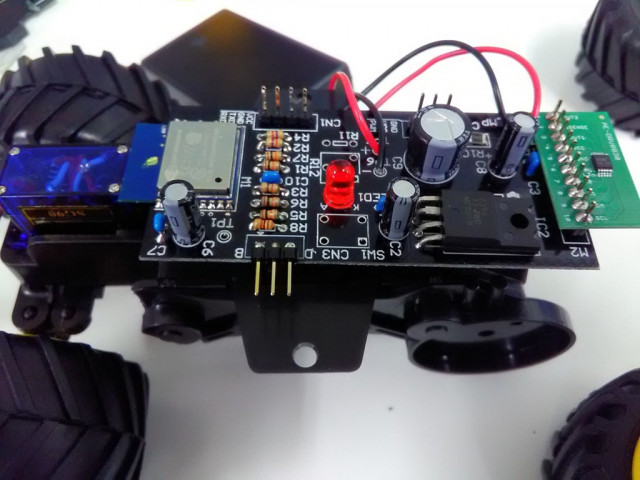
取り付けが完了しました。
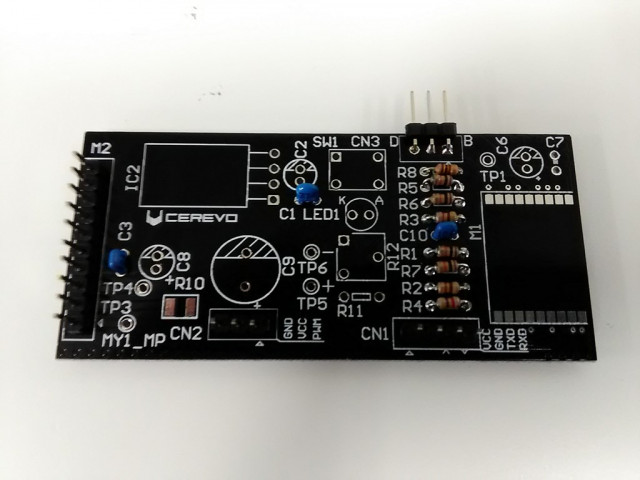
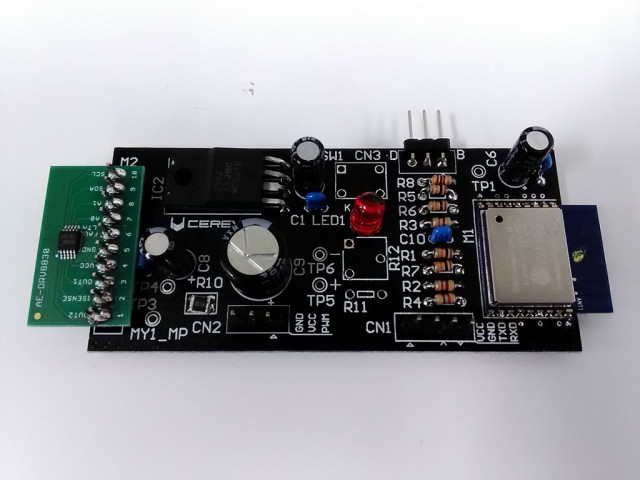
これでMKZ4基板は完成です!
MKZ4WKを準備する
さて、お次はMKZ4WKです。
MKZ4WKとは、MKZ4にプログラムを書き込むのに必要なものです。

これを、
こうして、

完成です!(特に難しい点はないので三分クッキングスタイルで行きます)
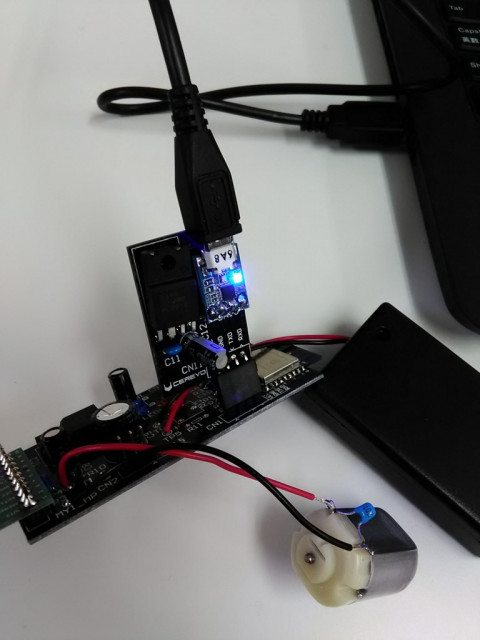
PCと接続して青いLEDが光ればOKです。
MKZ4基板にプログラムを書き込む
次からはMKZ4にMKZ4WKを通してプログラムを書き込んでいきます。
MKZ4のジャンパーがD側になっていることを確認してMKZ4WKをMKZ4に接続します。
MKZ4WKの接続する向きに注意しましょう。
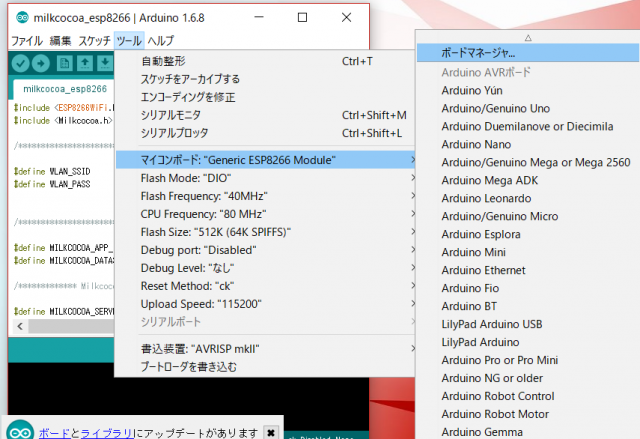
ソフトウェア編
ソフト側の準備として、Arduinoのインストールが必要です。ここからダウンロードしておきましょう。以降ではインストールが済んでいることを前提に進みます。
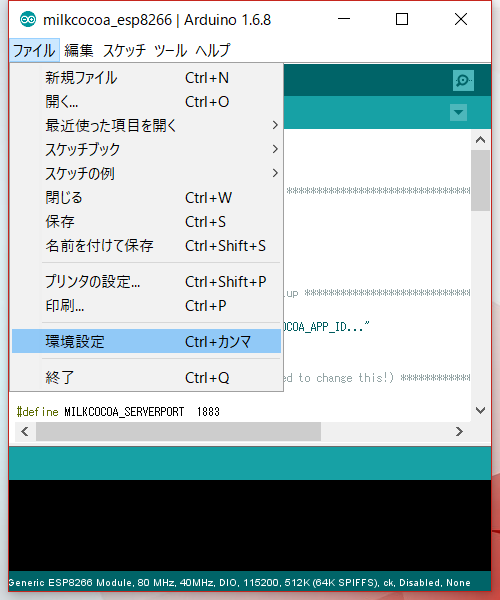
まず環境設定から、
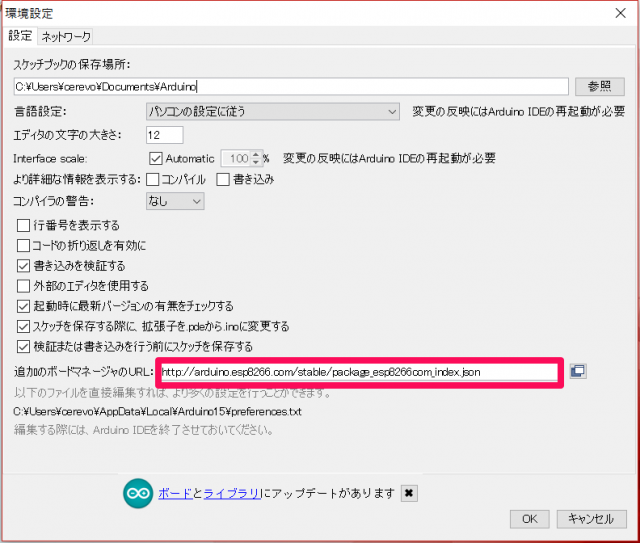
ボードマネージャーのURLを追加します。
ボードマネージャーから、
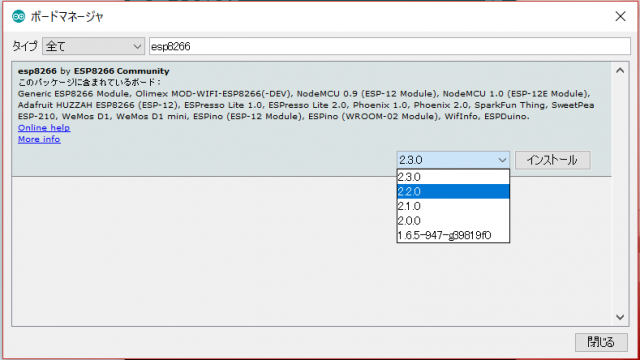
esp8266 by ESP8266 Communityのバージョン2.2.0をインストールします。
次にMKZ4のスケッチ(ソースコード)をここからダウンロードし展開しておきます。
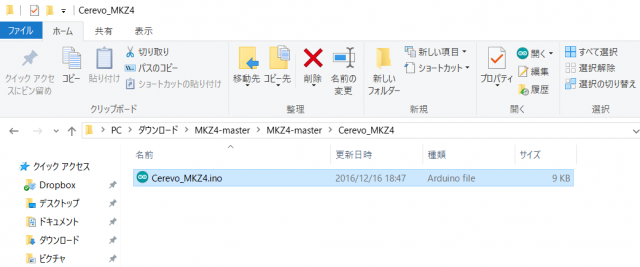
展開したファイルをダブルクリック。
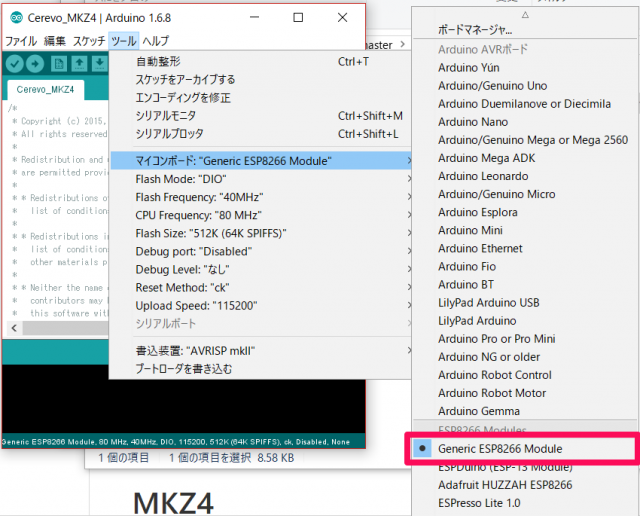
ボードマネージャーから該当のものを選択。
コンパイルし、
完了したらOKです。
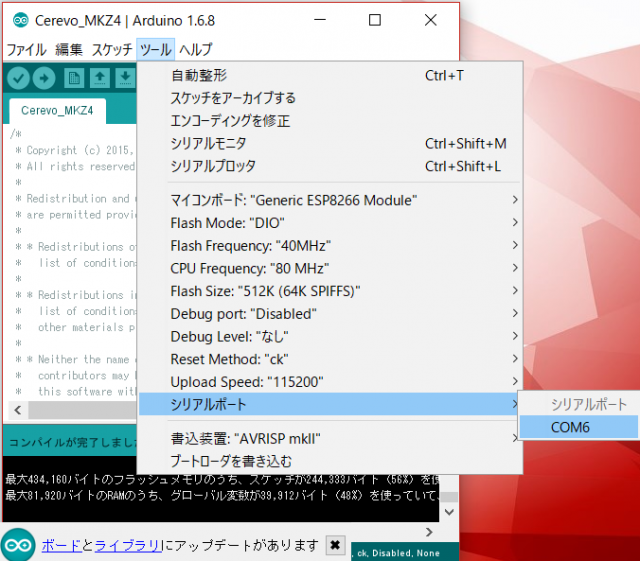
シリアルポートが表示されていればそれを選択します。
マイコンボード(MKZ4)に書き込みます。
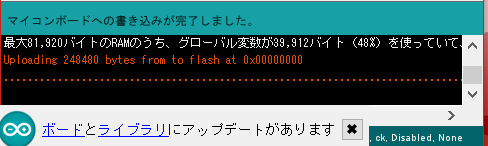
書き込みが完了しました!
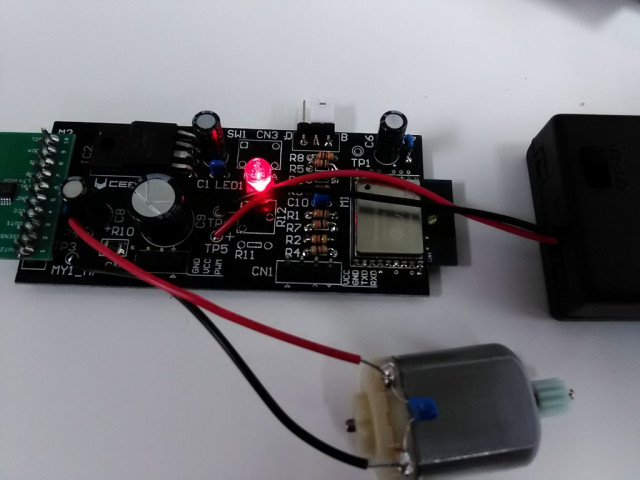
ジャンパーをB側に移して、電池ボックスの電源をONし、赤色LEDが点灯すれば書き込みが無事できています。
ここまでで電気とソフトウェアは終了です。
メカ編
さて次に、ワイルドミニ四駆の組み立てに移ります。
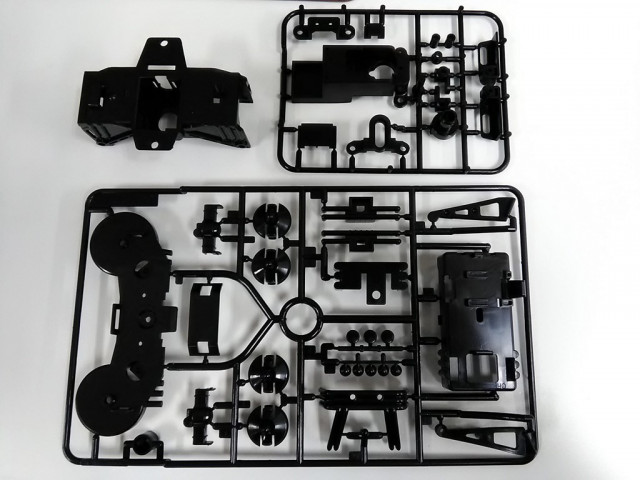
右上がMKZ4付属の特製パーツで、他はワイルドミニ四駆となります。
前輪のパーツを切っていきます。

二か所に切り込みを入れると、あとは力技で割れます。

本体シャーシも前輪部分を切っていきます。

ザクザク切ります。

前輪部分がカットできればOKです。手が疲れるので適宜休憩しながら行いましょう。
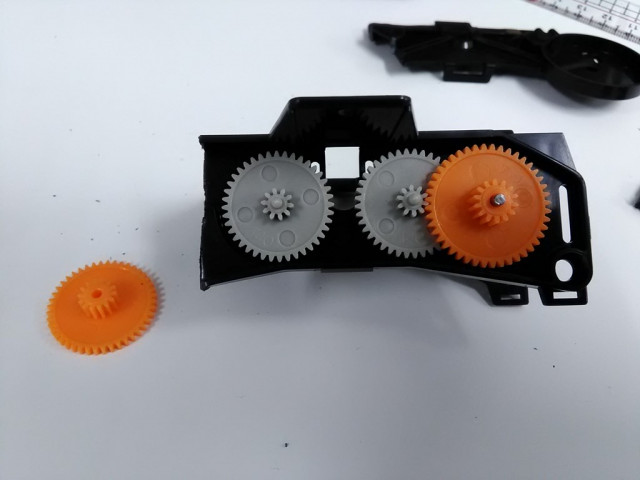
ギアをはめます。前輪部分は一つ使いません。

カバーをパチリ。
シャーシに穴をあける準備として、シールを張ります。

穴をあけるには3mmのピンバイスが必要ですが、あいにく壊れたドライバーしかオフィスにありませんでした。良いのです。ドライバーが必要なのではなく穴が必要なのですから。
こんな感じで二か所に穴をあければシャーシ側はOKです。

ホイールの加工をします。ギア部分をカット。

ドリルで六角の穴を丸くします。前輪について二つのホイールを加工します。ここで前輪に該当するホイールを誤ってしまうと完成しません。穴をあける前によく確認してください。なお、私はギアがついているホイールを両方とも前輪と勘違いしたため、とんでもないことになりました(後述)。

タイヤを装着。

黒いパーツを埋め込みます。

この辺りは説明書通りなのでサクサク進みます。(※実はここで映っているタイヤは本来前輪ではありません。その事実にこの時点で私はまだ気づいていません……)

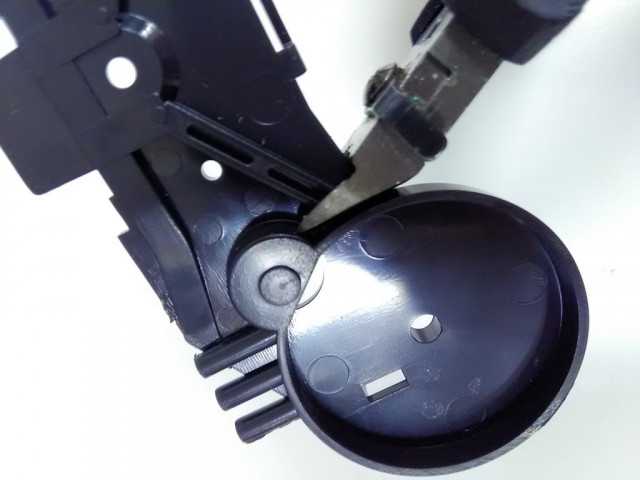
今回のキモのサーボです。サーボホーンの先端を合わせます。

ネジを留めていきますが、複数あるので注意が必要です。
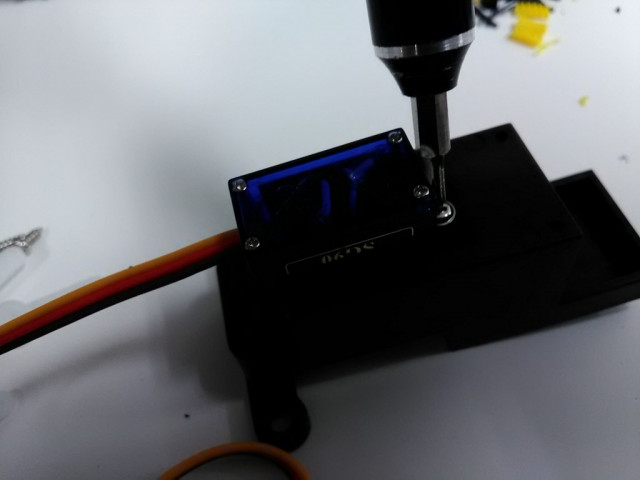
まずはサーボ本体を取り付けます。
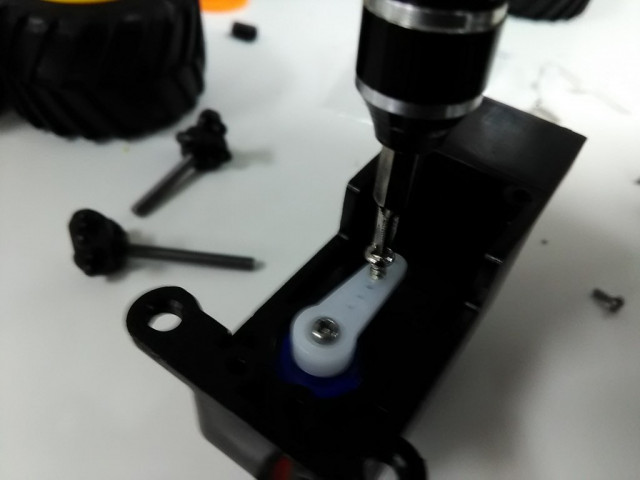
このように、先にサーボホーンに穴をあけましょう。


どんどんねじ留め。
前輪部分を本体シャーシに合体します。
前輪を取り付け……と行きたいところですがここで問題発生です。
なんと、前輪と後輪の組み合わせを間違えていました。
正しくはこちらです。
左後輪はギアがないとモーターの動力を受けることができません。わたしはこのギアがあるタイヤを前輪と勘違いしていたため、誤ってホイールの穴をドリル丸くしてしまいました。押切先生に懇願してタイヤを譲ってもらったのですが、交換用がない場合は新しいワイルドミニ四駆を準備する必要があります。大出費になってしまうので、くれぐれもドリルで穴をあける前にはどれが前輪でどれが後輪か注意して行ってください。

タイヤを取り付けます。
モーターをパチリ。

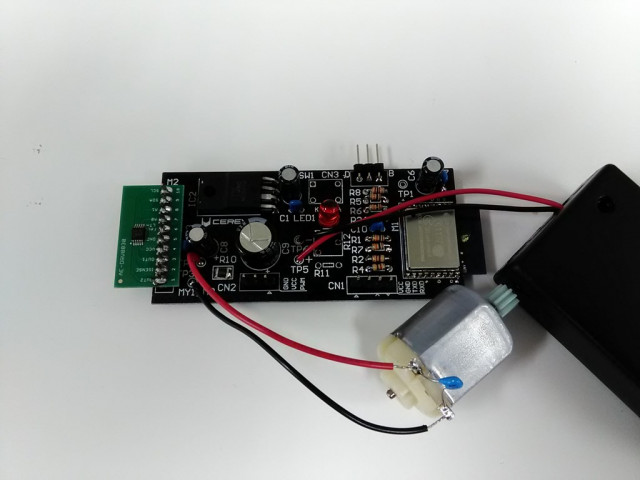
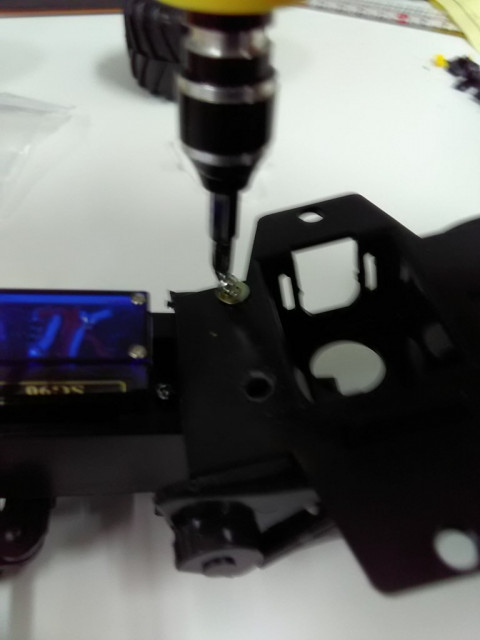
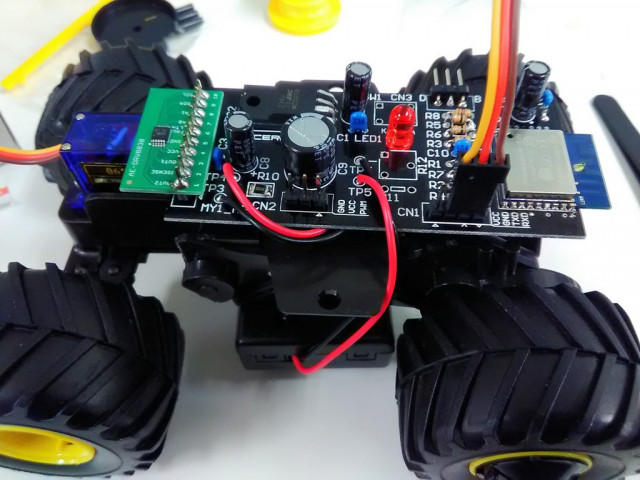
MKZ4基板を両面テープでくっつけます。
上から見た図。
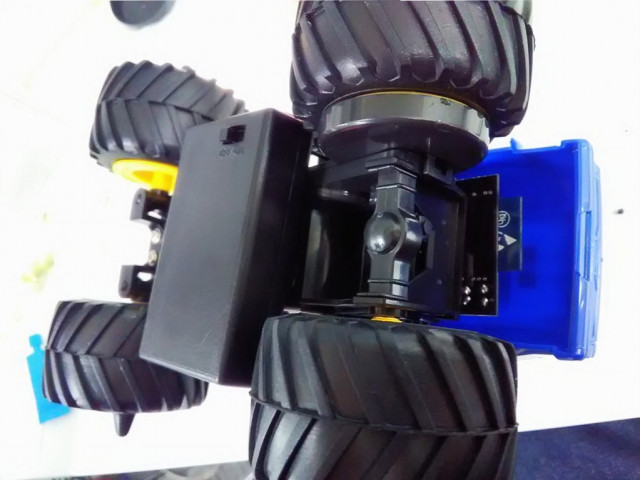
電池ボックスも本体シャーシに両面テープで固定します。私は導線を測らずに切ってしまったため短くなりすぎ、中央に固定することができませんでした。中央に固定しないと重心が左右に偏ってしまいますので、導線はきちんと測って切りましょう。



後輪も組み立て、取り付けます。

上側を留め具で留めます。
最後に後輪の軸の保護パーツを取り付けます。
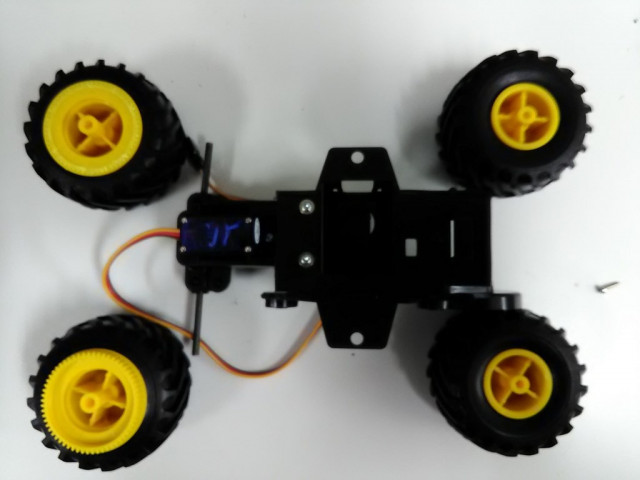
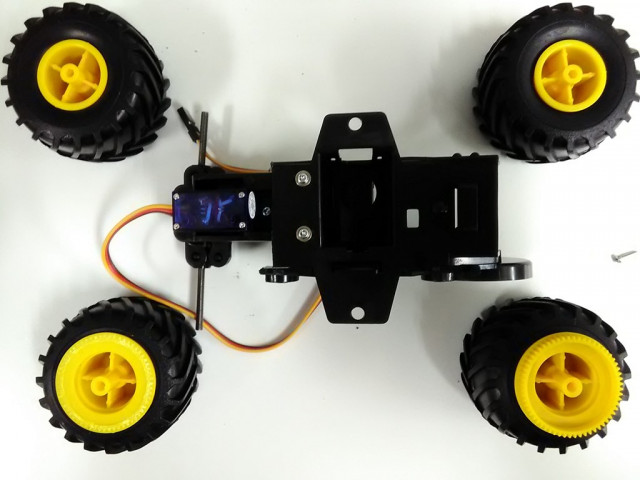
メカはこれで完了です。
個人的に鬼門だったのはサーボホーンの穴あけです。ネジがうまく回らずに時間がかかりました。タッピングネジには先が尖っているものと丸いものがありますが、尖っているものを用いることで穴を拡大しながらネジ締めを行うことができます。サーボホーンの穴あけには先が尖っているものを用いましょう。
動作確認編
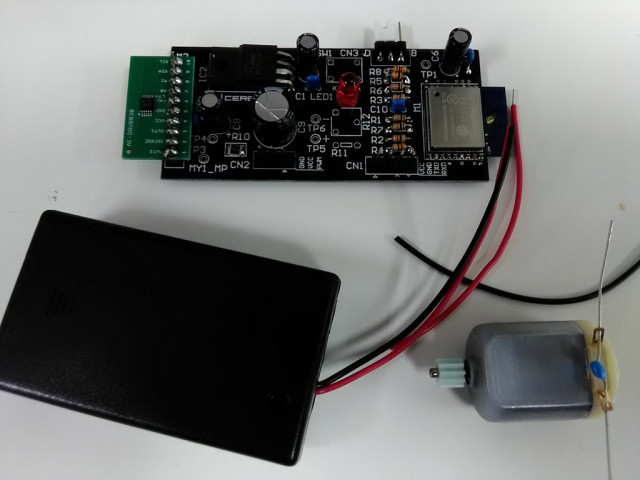
電気とメカが完成しました!
いよいよお待ちかねの動作確認です。テスタでの測定もかっ飛ばして先に進めることだけに注力していたので、内心ビクビクです。

電池ボックスに単四電池を三本入れ、電源をONにします。すると中の基板の赤LEDが点灯します。

スマートフォンのWi-Fiから、「MKZ4」を選びます。パスワードを入力する必要はありません。
接続が完了したら192.168.4.1にブラウザからアクセスします。

接続が確立すると、「CONNECTED」と表示されます。うまくいっているようです。
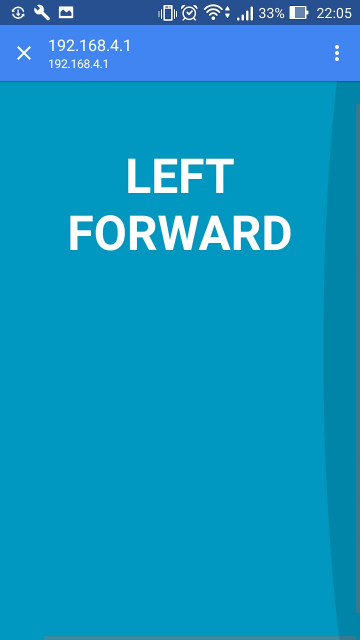
フリックで操作します。

おお! サーボが反応して前輪を左に傾けています!

勢い余って段ボールに激突してしまいました。
かなり急ぎ足で組み立てたため、まっすぐ走らせようとしても左に曲がっていきます。逆に右に曲がりません。これはサーボの中心位置がずれているため起こっていそうです。修正が必要なところですが、ひとまず動いたことに満足して、今回はここまでにしたいと思います。
終わりに
いかがだったでしょうか。
初めての『MKZ4』組み立てでしたが、私は4, 5時間はかかったと思います。これは日ごろ半田付けを訓練していたので、チップ抵抗やESP8266も問題なく、また基板の半田付けでエラーが生じずにストレートに動作確認までこぎつけられたからでしょう(ある意味エラーがなかったため起伏の乏しい記事になってしまったことは反省です)。半田付けも初めてという方は、この2倍程度の時間を想定されると良いかもしれません。
丸1日、日ごろの雑事を忘れて童心に帰るというのは楽しいですよ!
是非みなさんもトライしてみてください。
関連リンク